Lobachevskii Journal of Mathematics
Vol. 13, 2003, 67 – 80
©E. Laitinen, A.V. Lapin, and J. Pieska¨
E. Laitinen, A.V. Lapin, and
J. Pieska¨
NUMERICAL EXPERIMENTS WITH MULTILEVEL
SUBDOMAIN DECOMPOSITION METHOD
|
________________
Key words and phrases. Stefan problem, continuous casting process, finite
element method, predictor-corrector scheme, domain decomposition.
This work is supported by RFBR, project N 01-01-00068.
|
ABSTRACT. In this paper, we present a new numerical approach to solve
the continuous casting problem. The main tool is to use so-called IPEC
method and DDM similar to [6] with multilevel domain decomposition. On
the subdomains we use the multidecomposition of the subdomains. The IPEC
is used both in the whole calculation domain and inside the subdomains.
Calculation algorithm is presented and numerically tested. Several conclusions
are made and discussed.
1. Introduction
Theory of the so-called regional-additive schemes (splitting schemes with domain
decomposition) for linear diffusion and convection-diffusion have been studied in
[14],[15] and [16]. The stability have been proved and error estimates have
been deduced. For the non-linear problems like our their technique is not
available.
Several new finite-difference schemes for a nonlinear convection-diffusion
problem are constructed and numerically studied in [6]. These schemes are
constructed on the basis of non-overlapping domain decomposition and
predictor-corrector approach. (Note that the term “predictor-corrector
domain decomposition method” was introduced by Quarteroni and Valli
[13]).
The paper of Lapin and Pieska¨
[6] was motivated by [2], [9], [10], [11], where
TL1 ,
EP2 and
EPIC3
methods have been studied and tested. The EPIC method was proved to be stable
and scalable when solving on a big number of processors. In the paper [6] the
scheme from [10], [11] was modified in such a way, that its implementation leads to
IPEC4
method.
The main idea of these kind of algorithms is first to solve the problem in artificial
boundaries predictor step). After the solution at the boundaries is known then it
can be used as a Dirichlet-type boundary condition and the non-coupled subdomain
problems can be solved in parallel. The last step of these methods is to correct the
solution at the artificial boundaries (corrector step). The idea is similar to
Schur’s complement type methods but in our approach the calculation of the
artificial boundaries between subdomains are very easy and cheap to perform.
There is also no need to construct a good preconditioner for the interface
problems.
The advantages of predictor-corrector methods (IPEC or EPIC) is that we reduce
the amount of information sending between processors. We need to send only once
the subsolutions from slave processors to master processor. When we use
Schwarz alternating methods with the overlapping subdomains, the number of
sending and receiving is much more bigger. The numerical experiences show
that the speedup of IPEC method is very good comparing with Schwarz
methods and calculation times are roughly half of the times of Schwarz
methods. Moreover, the linear speedup is reached in the numerical tests of
[6].
The idea of multidecomposition method MDD is to use DDM with IPEC inside
the subdomains. The subdomain is divided into smaller subdomains and then IPEC
method is used to solve these smaller subproblems sequently.
The rest of the article is organized as follows. In the section 2 we present the
continuous casting problem. The section 3 deals with the mesh approximation of
the problem. The used domain decomposition and calculation algorithm is
presented in the section 4. The section 5 is devoted to numerical testing of the new
algorithm. Finally, in the section 6 the conclusions are made.
2. Problem statement
The continuous casting problem can be mathematically formulated as follows. Let the rectangular
domain Ω ⊂ ℝ2, Ω = (0,l
1) × (0,l2)
be occupied by a thermodynamically homogeneous and isotropic steel. We denote by
H ̄ (x,t) the enthalpy related to
the unit mass and by T(x,t)
the temperature for (x,t) ∈Ω ̄ × [0,tf].
We have constitutive law
H̄ = H̄(T) = ρ∫
0T c(Θ)dΘ + ρL(1 − f
s(T)),
where ρ is the density,
c(T) is the specific heat,
L is the latent heat and
fs (T) is the solid fraction
at temperature T
of the form
fs(T) = 1 for T < TS,
TL − T
TL − TS, for TS < T < TL,
0 for T > TL.
The graph H̄(T) is an
increasing function ℝ → ℝ,
involving near vertical segment, which corresponds to a phase transition state, namely, for
T ∈ [TS,TL]. In the case of piecewise
constant specific heat c(T),
the enthalpy function is piecewise linear of the form
H̄(T) = ᾱ1T + β̄1 for T < TS,
ᾱ2T + β̄2, for TS < T < TL,
ᾱ3T + β̄3 for T > TL.
Further by k(T)
we denote the thermal conductivity coefficient, which is continuous and increasing
in T.
A continuous casting process can be described by a boundary-value
problem, formally written in the following pointwise form: find
T (x,t) and
H ̄ (x,t) such
that
∂H̄
∂t + v∂H̄
∂x2 −∇⋅ (k(T)∇T) = 0 for x ∈ Ω,t > 0,
T = z̄(x,t) for x ∈ ΓD,t > 0,
k(T)∂T
∂n = g, for x ∈ ΓN,t > 0,
H̄ = H̄0(x) for x ∈Ω ̄,t = 0,
where v = const > 0 is a casting
speed in x2-direction,
ΓD ∪ ΓN = ∂Ω is the boundary of
the domain, below ΓD = {x ∈ ∂Ω : x2 = 0 ∨ x2 = l2}.
Using Kirchoff’s transformation u = K(T) = ∫
0T k(ξ)dξ
and the notation H(u) = H̄(T) = H̄(K−1(u)),
we can rewrite the continuous casting problem as
(P) ∂H
∂t + v∂H
∂x2 − Δu = 0, for x ∈ Ω,t > 0,
u = z(x,t) for x ∈ ΓD,t > 0,
∂u
∂n = g, for x ∈ ΓN,t > 0,
H = H0(x) for x ∈Ω ̄,t = 0,
The existence and uniqueness of a weak solution for problem (P) are proved in
[12].
In the case of piecewise constant specific heat
c(u) the
enthalpy function takes the form
|
H(u) = α1u + β1 for u < uS,
α2u + β2, for uS < u < uL,
α3u + β3 for u > uL.
| (1) |
3. Mesh approximation of continuous casting problem
We approximate problem (P) by an implicit in time finite difference scheme and by
a semi-implicit finite difference scheme, using for the approximation in space
variables a finite element method with the quadrature rules.
Let Ξh be a
partitioning of Ω in the
rectangular elements δ
of dimensions h1 × h2
and V h = {uh(x) ∈ H1(Ω) : u
h(x) ∈ Q1 for all δ ∈ Ξh}, where
Q1 is the space of bilinear
functions. By Πhv(x) we denote
the V h-interpolant of a
continuous function v(x),
i.e. Πhv(x) ∈ V h and coincides with
v(x) in the mesh nodes (vertices
of all δ ∈ Ξh). We also use an
interpolation operator Ph,
which is defined as follows: for any continuous function
v(x) the function
P h v(x) is piecewise linear
in x1, piecewise
constant in x2
and on δ = [x1,x1 + h1] × [x2,x2 + h2] it
coincides with v(x)
at (x1,x2 + h2)
and (x1 + h1,x2 + h2).
Let further V h0 = {u
h(x) ∈ V h : uh(x) = 0 for all x ∈ ΓD},
V h z = {u
h(x) ∈ V h : uh(x) = zh for all x ∈ ΓD}. Here
zh is the bilinear
interpolation of z on
the boundary ΓD. For any
continuous function v(x)
we define the quadrature formulas:
Sδ(v) = ∫
δΠhvdx,S∂δ(v) = ∫
∂δΠhvdx,Eδ(v) = ∫
δPhvdx,
SΩ(v) = ∑
δ∈ΞhSδv,SΓ2(v) = ∑
∂δ∈Ξh∩Γ ̄2S∂δ(v),EΩ(v) = ∑
δ∈ΞhEδ(v).
Let also ωτ = {tk = kτ, 0 ≤ k ≤ M,Mτ = tf} be an uniform
mesh in time on the segment [0,tf]
and ∂t ̄H = 1
τ(H(x,t) − H(x,t − τ)). Then the
implicit in time finite difference scheme with up-wind approximation of the convective term
v∂H∕∂x2 can be written as
follows: for all t ∈ ωτ,
t > 0, find uh ∈ V hz and
Hh ∈ V h such,
that
|
SΩ(∂t ̄Hhηh) + EΩ(v∂Hh
∂x2 ηh) + SΩ(∇uh∇ηh) = SΓ2(gηh) for all ηh ∈ V h0.
| (2) |
When constructing the characteristic mesh scheme we approximate the term
∂
∂t + v ∂
∂x2H by using
the characteristics of the first order differential operator (similar to [1], [3]). Namely, if
(x1 ,x2,t) is the mesh point
on the time level t
we choose x˜2 = x2 −∫
t−τtv(ξ)dξ
and approximate:
∂
∂t + v ∂
∂x2H ≈ 1
τ H(x1,x2,t) −H˜(x1,x2,t − τ) ,
where we denote H˜(x,t − τ) = H(x1,x˜2,t − τ).
Near the boundary it can happen that
x ˜ 2 < 0. In that case we
put H˜(x,t − τ) = H(x1, 0,t − τ). In what follows
we use the notation dt ˜H = 1
τ(H(x,t) −H˜(x,t − τ))
for the difference quotient in each mesh point on time level
t.
Now, the characteristic finite difference scheme for problem (P) is: for all
t ∈ ωτ,
t > 0, find uh ∈ V hz and
Hh ∈ V h such
that
|
SΩ(dt ˜Hhηh) + SΩ(∇uh∇ηh) = SΓ2(gηh) for all ηh ∈ V h0
| (3) |
Let N0 = card V h0 and
u ∈ ℝN0 be the vector of nodal
values for uh ∈ V h0. We use the
writing uh ⇔ u for this bijection.
We define N0 × N0 matrices by
the following relations: for all u,η ∈ ℝN0,u ⇔ u
h ∈ V h0 and η ⇔ η
h ∈ V h0,
(Ãu,η) = SΩ(∇uh∇ηh),(Mu,η) = SΩ(uhηh),(C˜u,η) = EΩ(v∂uh
∂x2 ηh),
A0 = M−1Ã,C = M−1C˜.
Let now z˜h(x) ∈ V h be the function,
which is equal to zh
on Γ ̄D and
0 for all nodes
in Ω ∪ ΓN. Then
a vector f
is defined by the equality
(f,η) = SΓ2(gηh) − SΩ(∇z˜h,∇ηh)∀η ∈ ℝN0
,η ⇔ ηh ∈ V h0,
and we set F = M−1f.
In these notations the algebraic form for implicit mesh scheme (2) at fixed time
level is:
|
∂t ̄H + A0u + CH = F,
| (4) |
while characteristic mesh scheme (3) becomes
It is easy to see, that A0
is the standard five-point finite difference approximation of Laplace operator,
A0 u = −ux1x̄1 − ux2x̄2 for the internal mesh
points with the notations ux1 = h−1(u(x
1 + h1,x2) − u(x1,x2)),ux̄1 = h−1(u(x
1,x2) − u(x1 − h1,x2)),
and similarly for ux2
and ux̄2.
For more detailed writing of the explicit form for
A0 u
let us introduce several sets of the grid points. Namely, let
ω ̄
be the set of all grid points, i.e. vertices of finite elements,
γD = Γ ̄D∩ω̄,γN = ΓN∩ω̄,ω = Ω∩ω̄,γN− = {x ∈ γ
N : x1 = 0},γN+ = {x ∈ γ
N : x1 = l1}.
Now A0 = A1 + A2
with
A1u = −ux1x̄1 for x ∈ ω,
−2h1−1u
x1 for x ∈ γN−,
2h1−1u
x̄1 for x ∈ γN+,
A2u = −ux2x̄2 for x ∈ ω ∪ γN,
0 for x ∈ γD.
The term CH in
the implicit scheme corresponds to an up-wind approximation of the nonlinear convective
term, CH = Hx̄2 for x ∈ ω ∪ γN.
4. Domain decomposition by straight lines
In this section we present the IPEC algorithm [6]. We restrict our discussion to the
case of decomposition by unidirect straight lines. More variations and possibilities of
decomposition are discussed and tested in [6]. Methods presented here and
in the following section can be easily implemented and used with more
complicated decompositions of calculation domain. Moreover, the generalization to
3-D case is straightforward. In that case the 1-D lines are replaced by 2-D
planes.
Let the domain Ω be decomposed
into two subdomains Ω1
and Ω2 by a
straight line Sy in
x2 -direction, which is also a
grid line. We denote by δSy
the characteristic function of this line, i.e., the mesh function
δSy (x) = 1 for
x ∈ Sy ∩ω̄, while
δSy (x) = 0 for other mesh points. Also,
let ω̄k,k = 1, 2 be the corresponding
to the subdomains Ω ̄k
sets of grid points, Sy
being the common part of their boundaries.
Let A2u = −δSyux1x̄1
and A1 = A0 − A2,
A1u = −(1 − δSy)ux1x̄1 − ux2x̄2 for x ∈ ω,
−2h1−1u
x1 − ux2x̄2 for x ∈ γN−,
2h1−1u
x̄1 − ux2x̄2 for x ∈ γN+.
Now, instead of implicit scheme (4) we consider the following scheme on the time
level tn+1 = (n + 1)τ:
|
1
τ(Hn+1∕2 − Hn) + A
1un+1∕2 + A
2un + CHn+1∕2 = F,
| (6) |
|
δSy
τ (Hn+1 − Hn) + 1 − δSy
τ (Hn+1 − Hn+1∕2)+
δSyA1un+1∕2 + A
2un+1 + δ
SyCHn+1 = δ
SyF.
| (7) |
Similarly, characteristic scheme (5) is changed by
|
1
τ(Hn+1∕2 −H˜n) + A
1un+1∕2 + A
2un = F,
| (8) |
|
δSy
τ (Hn+1 −H˜n) + 1 − δSy
τ (Hn+1 − Hn+1∕2) + δ
SyA1un+1∕2 + A
2un+1 = δ
SyF.
| (9) |
Let us discuss the implementation of scheme (6),(7). In the points of
Sy first
equation of (6) has the form:
|
Hn+1∕2 − Hn
τ − ux2x̄2n+1∕2 − u
x1x̄1n + H
x̄2n+1∕2 = F,
| (10) |
i.e. in the points of Sy
we have one-dimensional problem (10), that we solve first. After, the rest part of the
first equation in (6) is splitted into two non-coupled implicit schemes in the
subdomains:
|
Hn+1∕2 − Hn
τ − ux1x̄1n+1∕2 − u
x2x̄2n+1∕2 + H
x̄2n+1∕2 = F, for x ∈ ω
1 ∪ ω2,
Hn+1∕2 − Hn
τ − 2
h1ux1n+1∕2 − u
x2x̄2n+1∕2 + H
x̄2n+1∕2 = F, for x ∈ γ
N−,
Hn+1∕2 − Hn
τ + 2
h1ux̄1n+1∕2 − u
x2x̄2n+1∕2 + H
x̄2n+1∕2 = F, for x ∈ γ
N+
| (11) |
and these equations are accomplished by Dirichlet boundary conditions, given on
γD and calculated
from (10) on Sy.
Further, it is easy to check, that for the points
x∉Sy the
second equation (7) coincide with (11) and has the same Dirichlet boundary conditions
on γD and
on Sy, so,
un+1(x) = un+1∕2(x) for
x∉Sy and it makes
no sense to solve these equations. It remains only to solve the system of the equations,
corresponding to x ∈ Sy:
Hn+1 − Hn
τ − ux2x̄2n+1∕2 − u
x1x̄1n+1 + H
x̄2n+1∕2 = F.
As un+1(x) = un+1∕2(x)
for x∉Sy,
this system becomes
|
Hn+1 − Hn
τ + Hx̄2n+1∕2 + 2un+1(x
1,x2)
h12 − ux2x̄2n+1∕2
−un+1∕2(x
1 − h1,x2) + un+1∕2(x
1 + h1,x2)
h12 = F,x ∈ Sy,
| (12) |
i.e. we get the system of scalar equations for
(un+1(x),Hn+1(x)),x ∈ S
y.
Thus, the algorithm for the implementation of (6),(7) consists of 3 steps:
-
1):
- Predictor step: solving one-dimensional problem (10);
-
2):
- Main step: concurrent solving subproblems (11);
-
3):
- Corrector step: solving the system of scalar equations (12).
With the slight modifications the implementation of scheme (8),(9) is similar. Namely, in
the points of Sy
first equation of (8) has the form:
|
Hn+1∕2 −H˜n
τ − ux2x̄2n+1∕2 − u
x1x̄1n = F,
| (13) |
i.e. in the points of Sy
we have one-dimensional problem (13), that we solve first. After that the rest part
of first equation in (8) is splitted into two non-coupled characteristic schemes in the
subdomains:
|
Hn+1∕2 −H˜n
τ − ux1x̄1n+1∕2 − u
x2x̄2n+1∕2 = F, for x ∈ ω
1 ∪ ω2,
Hn+1∕2 −H˜n
τ − 2
h1ux1n+1∕2 − u
x2x̄2n+1∕2 = F, for x ∈ γ
N−,
Hn+1∕2 −H˜n
τ + 2
h1ux̄1n+1∕2 − u
x2x̄2n+1∕2 = F, for x ∈ γ
N+
| (14) |
and these equations are accomplished by Dirichlet boundary conditions, given on
γD and calculated
from (13) on Sy.
Finally it remains to solve the system of the equations, corresponding to
x ∈ Sy:
Hn+1 −H˜n
τ − ux2x̄2n+1∕2 − u
x1x̄1n+1 = F.
As un+1(x) = un+1∕2(x)
for x∉Sy,
this system becomes
|
Hn+1 −H˜n
τ + 2un+1(x
1,x2)
h12 − ux2x̄2n+1∕2
−un+1∕2(x
1 − h1,x2) + un+1∕2(x
1 + h1,x2)
h12 = F,x ∈ Sy,
| (15) |
i.e. we get the system of scalar equations for
(un+1(x),Hn+1(x)),x ∈ S
y.
Remark 1. Above we assumed that the calculation domain Ω
is divided into two parts Ω1
and Ω2.
This is not restrictive and we refer to [6] for more detailed discussion of the
decomposition into several subdomains, also with corner and cross points. Even
the case of curvilinear decomposition is studied in [6] and found to be stable
and accurate under the natural assumptions for the mesh parameters.
Remark 2. We consider the 2D-case. The proposed methods have natural
extensions to the 3D-case. We notice that in predictor and corrector steps the
one-dimensional problems corresponding to the mesh line Sy
are replaced by the two-dimensional problems corresponding to a plane Sxy.
4.1. Multidecomposition method.
The general idea of the multidecomposition is to divide the subdomain to smaller
subdomains i.e. we use two-level decomposition of the calculation domain. The
main reason is to decrease the algebraic size of the problems and thus make the
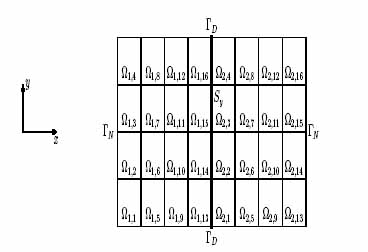
calculation times much smaller. The division of the subdomains is presented in the
figure 1. The idea of using multilevel decomposition is not new but the technique
presented in this paper gives a good and effective method when solving large
complex time dependent problems.
We use the notation Ωi = ⋃
ji=1pi
Ωi,ji.
The calculation algorithm for characteristic mesh scheme (13)-(15) is presented
below. The algorithm for implicit mesh scheme (10)-(12) is similar.
Algorithm 1.
-
:
-
-
1.:
- On a time level n
perform on the main processor the predictor step (13) on the artificial
boundary Sy.
-
2.:
- Send the values of un+1∕2
and Hn+1∕2
on the boundary Sy
to the slave processors.
-
3.:
- Concurrently on the slave processors perform the predictor step (13)
on the artificial boundaries of the subdomains Ωi,ji,i = 1, 2,j1 = 1,...,p1,j2 = 1,...,p2.
-
4.:
- Concurrently on the slave processors perform sequentially the main
step (14) on the subdomains Ωi,ji.
-
5.:
- Concurrently on the slave processors perform the corrector step (15)
on the artificial boundaries of the subdomains Ωi,ji,i = 1, 2,j1 = 1,...,p1,j2 = 1,...,p2.
-
6.:
- Send the values of un+1
and Hn+1
from slave processors to the master processor.
-
7.:
- On the main processor perform the corrector step (15) on the artificial
boundary Sy.
-
8.:
- Put n = n + 1,
if the final time tf
is reached then STOP, else GOTO 1.
Remark 3. On the step 3. of the algorithm 1 we do not do the predictor step
(13) on the artificial boundary Sy.
Remark 4. On the steps 3.-5. we do the calculations concurrently. However,
we do not synchronize our calculation in such a way that all processors move
from step to another at the same time. The step 6. is synchronization point
and it is performed at the same time.
The use of high number of subdomains inside the subdomain may increase the
error dramatically. To overcome this feature we introduce so called smoothing
steps to our method. Namely, our algorithm 1 is replaced by the following
one.
Algorithm 2.
-
:
-
-
1.:
- On the time step n
perform on the main processor the predictor step (13) on the artificial
boundary Sy.
-
2.:
- Send the values of un+1∕2
and Hn+1∕2
on the boundary Sy
to the slave processors.
-
3.:
- Concurrently on the slave processors perform the predictor step (13)
on the artificial boundaries of the subdomains Ωi,ji,i = 1, 2,j1 = 1,...,p1,j2 = 1,...,p2.
-
4.:
- Concurrently on the slave processors perform sequentially the main
step (14) on the subdomains Ωi,ji.
-
5.:
- Concurrently on the slave processors perform the corrector step (15)
on the artificial boundaries of the subdomains Ωi,ji,i = 1, 2,j1 = 1,...,p1,j2 = 1,...,p2.
-
6.:
- On the slave processors perform the smoothing step i.e. few iterations
of the MSOR-method (modified SOR-method) over the whole subdomain
Ωi.
-
7.:
- Send the subsolutions un+1
and Hn+1
from slave processors to the main processor.
-
8.:
- On the main processor perform the corrector step (15) on the artificial
boundary Sy.
-
9.:
- On the master processor perform few iterations of the MSOR-method
in the neighborhood of Sy.
-
10.:
- Put n = n + 1,
if the final time tf
is reached then STOP, else GOTO 1.
Remark 5. In the algorithm 2 we use the smoothing on steps 6. and 9.
According to our knowledge the good amount of MSOR-iterations is less than
10. This amount ensures the reducing of the error and do only slightly increase
the calculation time.
Remark 6. The step 9. in the algorithm 2 is performed in the neighborhood of
the artificial boundary Sy.
The good width of the smoothing area is about 10 grid lines i.e from artificial
boundary 5 grid lines to both directions.
Remark 7. In both algorithms 1 and 2 we use the predictor step 3. and
corrector step 5. which require the decomposition along and against the convection.
There are also cross points. In the article of Lapin and Pieska¨
[6] are discussed more carefully the implementation of such kind of decomposition.
Remark 8. The use of only two subdomains and processors is not restrictive.
The usage of more processors and subdomains is straightforward. The
numerical results presented in the section 5 verify this.
4.2. Multidecomposition method with one processor.
The multidecomposition algorithms 1 and 2 are very effective and extremely
quick in the case of many processors. We used the idea of multidecomposition
for the situation where we have only one processor. Now we do not have
artificial boundaries which decouples problem into subproblems. Anyway, we
still have boundaries between subdomains inside the whole domain. The
multidecomposition algorithm for one processor with characteristic mesh scheme
read as follows.
Algorithm 3.
-
:
-
-
1.:
- On every time level n
perform the predictor step (13) on the artificial boundaries of the
subdomains Ω1,j,j = 1,...,p.
-
2.:
- Perform sequentially the main step (14) on the subdomains Ω1,j.
-
3.:
- Perform the corrector step (15) on the artificial boundaries of the
subdomains Ω1,j,j = 1,...,p.
-
4.:
- Perform the smoothing step i.e. few iterations of the MSOR-method
over the whole calculation domain Ω.
-
5.:
- Put n = n + 1,
if the final time tf
is reached then STOP, else GOTO 1.
5. Numerical experiments with one processor
Let Ω =]0, 1[×]0, 1[ with the
boundary Γ divided in
two parts such that ΓD = {x ∈ ∂Ω : x2 = 0 ∨ x2 = 1}
and ΓN = Γ ∖ ΓD,
moreover let tf = 1.
Let us consider the case where the phase change temperature
uSL = 1 and the latent
heat L = 1. Let the phase
change interval be [uSL − ɛ,uSL + ɛ],
ɛ = 0.01, and the
velocity is v(t) = 1
5.
Our numerical example is
∂H
∂t − ΔK + v(t)∂H
∂x2=f(x; t) on Ω,
u(x1,x2; t)=(x1 −1
2)2 −1
2e−4t + 5
4 on ΓD,
∂u
∂n=1 on ΓN,
u(x1,x2; 0)=(x1 −1
2)2 + (x
2 −1
2)2 + 1
2 on Ω,
where Kirchoff’s temperature is according to it’s definition
K(u) = u if u < uSL − ɛ,
3
2u −1−ɛ
2 if u ∈ [uSL − ɛ,uSL + ɛ],
2u − 1 if u > uSL + ɛ,
and enthalpy
H(u) = 2u if u < uSL − ɛ,
1+8ɛ
2ɛ (u − 1) + 5+4ɛ
2 if u ∈ [uSL − ɛ,uSL + ɛ],
6u − 3 if u > uSL + ɛ.
Furthermore, let the known right-hand side be
f(x; t) = 4e−4t + 1
5(4x2 − 2) − 4 if u < uSL,
12e−4t + 1
5(12x2 − 6) − 8 if u > uSL.
The exact solution of our problem is
u(x1,x2; t) = (x1 −1
2)2 + (x
2 −1
2)2 −1
2e−4t + 1.
The stopping criterion of the calculations was the
L2 -norm of residual:
∥r∥L2(Ω) < 10−4. We divide the domain
Ω into non-overlapping
subdomains Ωi
presented in the figure 1.
We tested algorithm 3 in two different cases. First, we fixed the number of grid
points and changed the number of inner subdomains. The calculation grid was
129 × 129 in
space and we took 256 time steps. The calculation times for different number of
inner subdomains are presented in the table 1.
|
| | ♯ of inside subdomains | Time [s] |
|
| | 1 × 1 | 112.9 s |
| 2 × 2 | 76.2 s |
| 3 × 3 | 66.1 s |
| 4 × 4 | 56.9 s |
| 8 × 8 | 39.9 s |
|
| | |
| Table 1: | Calculation times in seconds for MDD when the grid size is fixed and
number of inside subdomains are changed. |
|
In the table 1 the 1 × 1
subdomain division means the calculation times for MSOR method for the whole
calculation domain.
In the second test case we changed the calculation grid and number
of time steps. We fixed the number of inner subdomains to be
4 × 4. For
many calculation grid this decomposition is not the optimal one but it very
clearly emphasizes the advantage of MDD. The results are in the table
2.
|
|
| | Grid | SEQ | MDD |
|
|
| | 65 × 65 × 128 | 8.67 s | 4.75 s |
| 129 × 129 × 256 | 112.9 s | 56.9 s |
| 257 × 257 × 512 | 1425 s | 687 s |
|
|
| | |
| Table 2: | Calculation times in seconds for sequential MSOR (SEQ) and MDD
when the calculation grid is changed. |
|
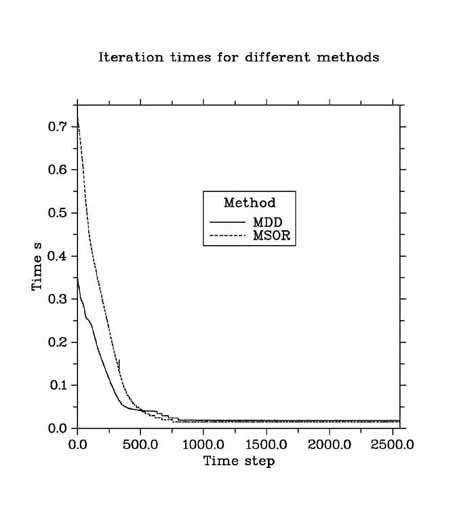
In the figure 2 we measured the time which different algorithms (MSOR
and MDD) spend at different time levels. In this case we had the grid size
129 × 129.
Normally for this kind of mesh we would take 256 times steps. Now we liked to test
how these methods behave when the solution goes to steady-state situation. We
took 2560 time steps i.e. 10 times more than usually to see the behavior. The MDD
is much better comparing to MSOR in the beginning of the calculations when we
have big changes in our simulation.
When time increases the calculation time drop very rapidly and both methods
spend equal amount of time for each time step. This is good result for MDD
because it is very effective for the case when we have big changes. Near steady-state
situation it is as good as MSOR.
6. Conclusions
The numerical examples show that the multidecomposition method (MDD) is
very effective numerical method when solving continuous casting problem.
The idea to divide the subdomains to smaller subdomains seems to be
very good and profitable. The algebraic dimensions of the subproblems
inside the subdomains are very small and thus they are very quick to solve.
The dimension is in many cases so small that even direct solvers could be
effective.
The numerical results for one processor seem to be very promising. We do not
need to have big parallel computers to achieve advantages of parallel computer.
Only few processors are enough and in some cases even only one processor is good.
The table 2 very clearly shows the advantages of MDD. In that table the
decomposition is clearly not optimal. The table 1 is good indicator to that.
Anyhow, even with poor knowledge of the problem MDD method can be used.
When the system is stable and big changes do not appear (like the number of grid
points changes or time step changes) then MDD can be optimized good and
numerical advantages comparing with MSOR method in the case of one processor
and with additive Schwarz alternating method in the case of many processor
becomes very dramatical.
References
[1] Z. Chen, Numerical solutions of a two-phase continuous casting
problem, Numerical Methods for Free Boundary Problem, P.
Neittaanma¨ki,
eds. International Series of Numerical Mathematics 99.,
Birkha¨user,
Basel., pp. 103-121, 1991.
[2] C. N. Dawson, Q. Du and T. F. Dupont, A finite difference domain decomposition
algorithm for numerical solution of the heat equation, Mathematics of Computation,
vol. 57, pp. 63-71, 1991.
[3] J. Jr. Douglas and T.F. Russel, Numerical methods for convection-dominated diffusion
problem based on combining the method of characteristic with finite element or finite
difference procedures, SIAM J. Numer. Anal., V. 19., pp. 871-885, 1982.
[4] E. Laitinen and A.V. Lapin, Semi-Implicit Mesh Scheme and Splitting Iterative Methods
for the Solution of Continuous Casting Problem, Preprint, University of Oulu, Finland,
19p., 1999
[5] E. Laitinen, A.V Lapin and J. Pieska¨,
Splitting iterative methods and parallel solution of variational inequalities, Lobachevskii
Journal of Mathematics, Vol. 8, p. 167-184, 2001. http://ljm.ksu.ru/vol8/latin.htm
[6] A.V Lapin and J. Pieska¨,
On the parallel domain decomposition algorithms for time-dependent
problems, Lobachevskii Journal of Mathematics, Vol. 10, p. 27-44, 2002.
http://ljm.ksu.ru/vol10/lpp.htm
[7] A.V. Lapin and D.O. Solovyev, Splitting iterative methods for variational inequalities,
Preprint No 783, Center of Calcul., Novosibirsk, 24 p., 1988
[8] J.M Ortega and W.C. Rheinboldt, Iterative solution of nonlinear equations in several
variables, Academic Press Inc. Orlando, Florida 1970.
[9] W. Rivera, J. Zhu and D. Huddleston, An efficient parallel algorithm with application
to computational fluid dynamics, To be appear in Computers and Mathematics with
Applications.
[10] W. Rivera and J. Zhu, A scalable parallel domain decomposition algorithm for
solving time dependent partial differential equations, Proceedings of the International
Conference on Parallel and Distributed Processing Technology and Applications, edited
by H. R. Arabnia, CSREA Press, Athens GA, pp. 240-246, 1999.
[11] W. Rivera, J. Zhu and D. Huddleston, An efficient parallel algorithm for solving
unsteady nonlinear equations, Proceedings of the International Conference on Parallel
Processing Workshops, edited by T. M. Pinkston, IEEE Computer Society, Los
Alamitos, California, pp. 79-84, 2001.
[12] J. F. Rodrigues and F. Yi, On a two-phase continuous casting Stefan problem with
nonlinear flux, Euro J. App. Math., V. 1., pp. 259-278, 1990.
[13] A. Quarteroni and A. Valli, Domain decomposition methods for partial differential
equations, Clarendon Press Oxford, New York 1999.
[14] A.Samarskii, P.Vabischevich, Finite difference schemes with operator multipliers,
Minsk, Institute of Mathematics of Belorussia, 442pp, 1998.
[15] A.Samarskii,
P.Vabischevich, Factorized regional-additive schemes for convection-diffusion problems
(in Russian), Reports of Rusian Acad.Sciences (Mathematics), 1996, V.346, P/742-745.
[16] P.Vabischevich, Parallel domain decomposition algorithms for time-dependent problems
of mathematical physics , Advances in Numerical Methods and applications. Singapore:
World scientific, 1994, P.293-299.
UNIVERSITY OF OULU, FINLAND.
KAZAN STATE UNIVERSITY, RUSSIA.
E-mail address: alapin@ksu.ru
UNIVERSITY OF OULU, FINLAND.
ReceivedOctober 15, 2003